Principio di funzionamento dei motori asincroni trifase
Principio di funzionamento:
Il principio di funzionamento di un motore asincrono si basa sulla creazione di una corrente indotta in un conduttore quando questo interrompe le linee di forza di un campo magnetico;
da qui deriva il nome di "motore a induzione".
L’azione combinata di questa corrente indotta e del campo magnetico crea una forza motrice sul rotore del motore.
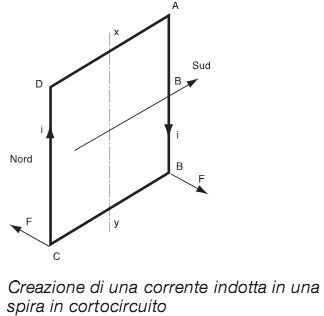
Supponiamo una spira ABCD in corto-circuito, situata in un campo magnetico B, e mobile intorno ad un asse xy.
Se ad esempio facciamo ruotare il campo magnetico in senso orario, la spira viene sottoposta ad un flusso variabile e diventa sede di una forza elettromotrice indotta che genera una corrente indotta i (legge di
Faraday).
Secondo la legge di Lenz, il senso della corrente è tale da opporsi per la sua azione elettromagnetica alla causa che lo ha generato. Ciascuno dei due conduttori è quindi sottoposto ad una forza F di Laplace (di Lorentz, per gli anglosassoni), di senso opposto al suo spostamento relativo rispetto al campo induttore.
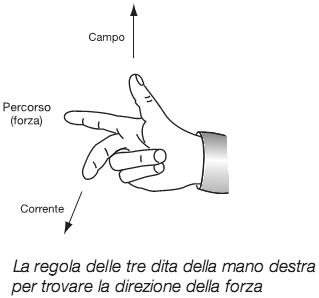
La regola delle tre dita della mano destra (azione del campo su una corrente, consente di definire facilmente il senso della forza F applicata a ogni conduttore.
Il pollice è posizionato nel senso del campo dell'induttore.
L'indice indica il senso della forza.
Il medio è posizionato nel senso della corrente indotta.
La spira è quindi sottoposta ad una coppia che provoca la sua rotazione nello stesso senso del campo induttore, detto campo rotante.
La spira inizia a ruotare e la coppia elettromotrice prodotta equilibra la coppia resistente.
Creazione del campo rotante:
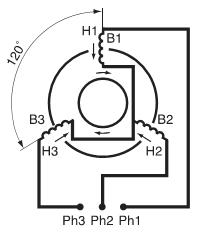 Tre avvolgimenti, geometricamenti scalati di 120°, vengono alimentati ciascuno da una delle fasi di una rete trifase alternata.
Tre avvolgimenti, geometricamenti scalati di 120°, vengono alimentati ciascuno da una delle fasi di una rete trifase alternata.
Gli avvolgimenti sono percorsi da correnti alternate che presentano lo stesso sfasamento elettrico e che producono ciascuno un campo magnetico alternato sinusoidale.
Questo campo, sempre diretto in base allo stesso asse, è massimo quando la corrente nell'avvolgimento è massima.
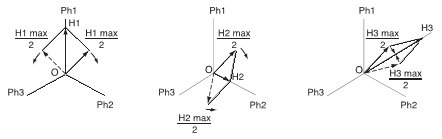
Il campo generato da ogni avvolgimento è la risultante di due campi che girano in senso inverso e aventi ognuno come valore costante la metà del valore del campo massimo. Ad un istante t1 qualunque del periodo, i campi prodotti da ciascun avvolgimento possono venire rappresentati come segue:
- il campo H1 diminuisce. I due campi che lo costituiscono tendono ad allontanarsi dall'asse OH1,
- il campo H2 aumenta. I due campi che lo costituiscono tendono ad avvicinarsi all'asse OH2,
- il campo H3 aumenta. I due campi che lo costituiscono tendono ad avvicinarsi all'asse OH3.
Il flusso corrispondente alla fase 3 è negativo. Il campo è quindi diretto nel senso opposto alla bobina.
Sovrapponendo i tre diagrammi, constatiamo che:
- i tre campi che ruotano in senso antiorario sono spostati di 120° e si annullano,
-
i tre campi che ruotano in senso orario si sovrappongono.
Questi campi si uniscono per formare il campo rotante di ampiezza costante 3Hmax/2. È un campo a coppia di poli, - questo campo effettua un giro durante un ciclo della corrente d'alimentazione. La sua velocità dipende dalla frequenza della rete (f) e dal numero di coppie di poli (p)e viene chiamata "velocità di sincronismo”.
Scorrimento:
La coppia motore esiste solo se una corrente indotta circola nella spira.
Questa coppia è determinata dalla corrente che circola nella spira e che può essere presente solo se esiste una variazione di flusso nella spira.
Quindi è necessario che ci sia una differenza di velocità tra la spira e il campo rotante.
È il motivo per cui un motore elettrico che funziona in base al principio appena descritto viene chiamato "motore asincrono".
La differenza tra la velocità di sincronismo (Ns) e quella della spira (N) è detta “scorrimento” (g) e si esprime in % della velocità di sincronismo.
g = [(Ns - N) / Ns] x 100
In funzionamento, la frequenza della corrente rotorica si ottiene moltiplicando la frequenza di alimentazione per lo scorrimento.
All’avviamento la frequenza della corrente rotorica è quindi massima e pari a quella della corrente statorica. La frequenza della corrente statorica diminuisce progressivamente nel corso della messa in fase del motore.
Lo scorrimento in regime stabilito varia in base al carico del motore e in base al livello della tensione d’alimentazione applicato.
Sarà minore quanto più il motore sarà a carico ridotto ed amumenterà se il motore sarà alimentato al di sotto della tensione nominale corrispondente alla frequenza d’alimentazione
Velocità di sincronismo:
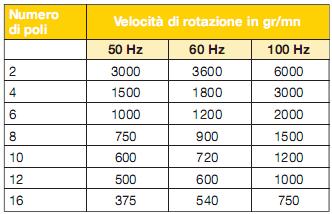 La velocità di sincronismo dei motori asincroni trifase è proporzionale alla frequenza della corrente d’alimentazione e inversamente proporzionale al numero di coppie di poli che compongono lo statore.
La velocità di sincronismo dei motori asincroni trifase è proporzionale alla frequenza della corrente d’alimentazione e inversamente proporzionale al numero di coppie di poli che compongono lo statore.
Ad esempio: Ns = 60 f/p
Con:Ns: velocità di sincronismo in gr/min,
f: frequenza in Hz,
p: numero di coppie di poli.
Per le frequenze industriali di 50Hz e 60Hz e per la frequenza di 100Hz, le velocità di rotazione del campo rotante, o velocità di sincronismo, in funzione del numero di poli, sono indicate nella tabella a lato.
Questo non significa che sia sempre possibile aumentare la velocità di un motore asincrono alimentandolo con una frequenza superiore a quella per la quale è previsto, anche se la tensione è adatta.
Conviene in effetti verificare se le caratteristiche meccaniche ed elettriche proprie del motore lo consentono.
Come già detto, tenuto conto dello scorrimento, le velocità di rotazione a
carico dei motori asincroni sono leggermente inferiori alle velocità di
sincronismo indicate nella tabella.
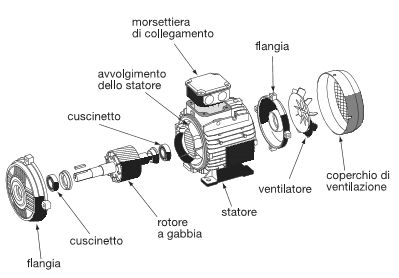
Composizione:
Un motore asincrono trifase a gabbia è composto da due parti principali:
un induttore o statore e un indotto o rotore.
Lo statore:
È la parte fissa del motore. Un'armatura in ghisa o in lega leggera racchiude una corona di lamierini sottili (dell'ordine di 0,5 mm di spessore) in acciaio al silicio.
I lamierini vengono isolati tra loro mediante ossidazione o con vernice isolante.
La "composizione lamellare" del circuito magnetico riduce le perdite mediante isteresi e mediante correnti
di Foucault.
I lamierini sono dotati di incastri nei quali vengono posizionati gli avvolgimenti dello statore destinati a produrre il campo rotante (tre avvolgimenti nel caso di un motore trifase).
Ogni avvolgimento è composto da diverse bobine. Il modo di accoppiamento di queste bobine tra loro definisce il numero di coppie di poli del motore e quindi la velocità di rotazione.
Il rotore:
È la parte mobile del motore. Come il circuito magnetico dello statore, è costituito da un impilaggio di lamierini sottili isolati tra loro e che formano un cilindro inchiavettato sull'albero del motore.
A seconda della tecnologia del rotore è possibile distinguere due tipi di motori asincroni: quelli il cui rotore è detto “a gabbia”, e quelli il cui rotore bobinato è detto “ad anelli”.
I diversi tipi di rotore:
Il rotore a gabbia:
 Esistono diversi tipi di rotore a gabbia, tutti progettati come l’esempio illustrato a lato.
Esistono diversi tipi di rotore a gabbia, tutti progettati come l’esempio illustrato a lato.
I diversi tipi di rotore a gabbia, dal meno diffuso al più comunemente utilizzato sono:
- Rotore a gabbia resistente
Il rotore resistente è molto diffuso soprattutto in gabbia singola (vedere più avanti la definizione di motore a gabbia singola). Di solito la gabbia è racchiusa tra due anelli in inox resistente (lega particolare, sezione ridotta,
ecc...).
Questi motori presentanto un forte scorrimento alla coppia nominale.
La coppia di avviamento è elevata e la corrente di avviamento è debole.
A causa delle perdite nel rotore, il loro rendimento non è buono.
Questi motori vengono generalmente utilizzati in applicazioni per le quali è importante avere uno scorrimento, ad esempio per regolare la velocità in funzione della coppia:
- caso di più motori collegati meccanicamente sui quali deve essere ripartito il carico, quali treni di laminazione a rulli, azionamento gru di sollevamento,
- funzione avvolgitore-svolgitore con motori a coppia Alquist previsti a tale scopo,
- necessità di una forte coppia di avviamento con una corrente di spunto limitata (paranchi o nastri trasportatori).
Consentono la variazione di velocità tramite modifica della sola tensione, ma questa applicazione tende a scomparire a vantaggio dei convertitori di frequenza.
La maggior parte dei motori sono autoventilati, anche se alcuni motori con rotore a gabbia resistente sono motoventilati (motorizzazione separata dal ventilatore).
- Rotore a gabbia singola
Nei fori o negli incastri disposti sulla parte esterna del rotore (cilindro costituito da lamiere impilate) sono posizionati alcuni conduttori collegati ad ogni estremità da una corona metallica e sui quali si esercita la coppia
motore generata dal campo rotante.
Perchè la coppia sia regolare i conduttori vengono leggermente inclinati rispetto all'asse del motore.
L'insieme ha l'aspetto di una gabbia di scoiattolo, da cui deriva il nome di questo tipo di rotore.
La gabbia di scoiattolo è generalmente costituita da un unico pezzo (soltanto i motori molto grandi vengono realizzati utilizzando dei conduttori inseriti negli incastri).
L’alluminio viene iniettato sotto pressione e le alette di raffreddamento, colate durante la stessa operazione, garantiscono la messa in cortocircuito dei conduttori dello statore.
Questi motori hanno una coppia di avviamento relativamente bassa e la corrente consumata alla messa sotto tensione è notevolmente superiore alla corrente nominale.
I motori asincroni motoventilati a forte scorrimento vengono utilizzati nella variazione di velocità; la loro corrente al bloccaggio è vicina alla corrente nominale.
La loro caratteristica coppia/velocità è importante.
Con un’alimentazione variabile, è possibile adattare questa caratteristica e regolare la coppia motore in funzione della trazione desiderata.
D’altro canto hanno uno scorrimento debole alla coppia nominale e vengono utilizzati principalmente in forte potenza per migliorare il rendimento delle installazioni su pompe e ventilatori.
Vengono anche associati a convertitori di frequenza a velocità variabile risolvendo perfettamente i problemi di coppia e di corrente di avviamento.
- Rotore a gabbia doppia
È composto da due gabbie concentriche, una esterna con maggiore valore resistivo e una sezione minore; l'altra interna, di resistenza minore e con una sezione maggiore
- All’inizio dell’avviamento, dal momento che le correnti rotoriche hanno una frequenza elevata, l’effetto pelle risultante fa sì che tutta la corrente rotorica circoli alla periferia del rotore e quindi in una sezione
ridotta dei conduttori. La coppia prodotta dalla gabbia esterna resistente è elevata e lo spunto di corrente ridotto.
- A fine avviamento la frequenza nel rotore diminuisce, il passaggio del flusso attraverso la gabbia interna risulta più facile. Il motore si comporta quindi come se fosse composto da una sola gabbia poco resistente. In regime stabilito, la velocità è solo leggermente inferiore a quella del motore a gabbia singola.
• Rotore a incastri profondi
È la realizzazione standard. I conduttori sono saldati negli incastri del rotore che hanno una forma trapezoidale con il lato corto del trapezio all’esterno del rotore.
Il funzionamento è analogo a quello del motore a gabbia doppia e l’intensità della corrente del rotore varia in modo inversamente proporzionale alla sua frequenza.
Quindi:
- All’inizio dell’avviamento la coppia è elevata e lo spunto di corrente ridotto.
- In regime stabilito la velocità è sostanzialmente quella del motore a gabbia singola.
Il rotore bobinato (rotore ad anelli)
 Negli incastri all’estremità del rotore sono posizionati degli avvolgimenti uguali a quelli dello statore.
Negli incastri all’estremità del rotore sono posizionati degli avvolgimenti uguali a quelli dello statore.
Il rotore è generalmente trifase. Un'estremità di ciascun avvolgimento è collegata a un punto comune (accoppiamento stella). Le estremità libere possono essere collegate su un'interfaccia centrifuga o su tre anelli in rame, isolati e integrati al rotore.
Sugli anelli scorrono delle spazzole in grafite collegate al dispositivo di avviamento.
In funzione del valore delle resistenze inserite nel circuito rotorico, questo tipo di motore può sviluppare una coppia di avviamento che raggiunge fino a 2,5 volte la coppia nominale.
La corrente all’avviamento è sensibilmente proporzionale alla coppia sviluppata sull’albero motore.
Questa soluzione viene sempre meno utilizzata, a vantaggio delle soluzioni elettroniche, associate ad un motore a gabbia standard.
Queste consentono infatti di risolvere i problemi di manutenzione (sostituzione delle spazzole d’alimentazione del rotore, manutenzione delle resistenze di regolazione), di ridurre l’energia dissipata nelle resistenze e anche di migliorare notevolmente il rendimento dell’installazione.